Toplista

- betöltés...
Ha szívesen korrepetálnál, hozd létre magántanár profilodat itt.
Ha diák vagy és korrepetálásra van szükséged, akkor regisztrálj be és írd meg itt, hogy milyen tantárgyban!
Az alábbi feladatokat hogyan oldanátok meg?(matlab)
 asdasdasd
kérdése
asdasdasd
kérdése
537
Irányitás technikáról lenne szó. A feladatok pedig az alábbiak:
– Az alábbi P1(s) rendszerhez a következő C(s) PID szabályzót terveztük meg: AP=17, TI=3.7, TD=1 és N=9.
Adja meg a zárt szabályozási kör T(s) eredő átviteli függvényét. Ábrázolja a P(s) illetve a T(s) rendszerek átmeneti függvényét, majd a minőségi jellemzők értékeinek kiszámításával hasonlítsa a szabályozatlan és a szabályozott rendszer viselkedését.
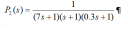
Tervezzen soros PD és PI szabályzót az alábbi P2(s) folyamat kompenzálására a póluskiejtés módszerével úgy, hogy biztosítsa a 50o-os fázistartalékot.
Ábrázolja az így kapott zárt szabályzási körök esetén a kimenő jelet és a beavatkozó jelet egységugrás alapjel esetén és vesse össze őket!
Hálás lennék ha konkrét matlab kóddal tudnátok szemléltetni a helyes kivitelezést!
– Az alábbi P1(s) rendszerhez a következő C(s) PID szabályzót terveztük meg: AP=17, TI=3.7, TD=1 és N=9.
Adja meg a zárt szabályozási kör T(s) eredő átviteli függvényét. Ábrázolja a P(s) illetve a T(s) rendszerek átmeneti függvényét, majd a minőségi jellemzők értékeinek kiszámításával hasonlítsa a szabályozatlan és a szabályozott rendszer viselkedését.
Tervezzen soros PD és PI szabályzót az alábbi P2(s) folyamat kompenzálására a póluskiejtés módszerével úgy, hogy biztosítsa a 50o-os fázistartalékot.
Ábrázolja az így kapott zárt szabályzási körök esetén a kimenő jelet és a beavatkozó jelet egységugrás alapjel esetén és vesse össze őket!
Hálás lennék ha konkrét matlab kóddal tudnátok szemléltetni a helyes kivitelezést!
Jelenleg 1 felhasználó nézi ezt a kérdést.
0
Felsőoktatás / Fizika
Válaszok
3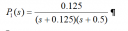
 AlBundy
{ Polihisztor }
megoldása
AlBundy
{ Polihisztor }
megoldása
Nem mondtad meg, hogy mivel mit jelölsz... Én az alábbi alakban fogom felírni a PD és PI szabályzó átviteli függvényét:
`W_\text{PD}(s)``=``A_p(1+(s T_d)/(1+sT_c))``=``A_p (1+s(T_d+T_c))/(1+sT_c)`
`W_\text{PI}(s)``=``A_p(1+1/(sT_i))``=``A_p (1+sT_i)/(sT_i)`
`A_p` az arányos tag erősítése, `T_i` az integráló tag időállandója, `T_d` és `T_c` a differenciáló tag paraméterei, és feltételezem, hogy `N=T_d/T_c`.
A felnyitott kör átviteli függvénye a szabályzó és a szabályozandó rendszer átviteli függvényeinek szorzata:
`W_o(s)=W_\text{szab}(s)*P(s)`
Az a cél, hogy a szabályzó zérusaival kiejtsük a rendszer leglassabb időállandójú pólusait, így gyorsítva a szabályozott rendszer dinamikáját. Egész pontosan a PI szabályzóval a leglassabb pólust szokás kiejteni, a PD szabályzóval pedig a második leglassabbat:
`T_i=T_1`
`T_d+T_c=(N+1)T_c=T_2`
Ebből megvannak az időállandók, már csak `A_p` a kérdés. Ezzel fogjuk beállítani a kívánt fázistartalékot. Ezt úgy érdemes csinálni, hogy először beállítjuk az `A_p=1` értéket, majd leolvassuk a Bode-diagramról, hogy ekkor mennyi az erősítés azon a körfrekvencián, ahol a fáziskarakterisztika értéke -130°. Ennek az erősítésnek a reciproka lesz `A_p` kívánt értéke, így lesz a fázistartalék 50°.
Itt egy rövid MATLAB kód, ami elvégzi a szabályzótervezést a második rendszerhez: https://pastebin.com/huP2WUvf
Remélhetőleg az első rendszer analízisét ez alapján magad is el tudod végezni (pzmap, margin, feedback, step függvények).
`W_\text{PD}(s)``=``A_p(1+(s T_d)/(1+sT_c))``=``A_p (1+s(T_d+T_c))/(1+sT_c)`
`W_\text{PI}(s)``=``A_p(1+1/(sT_i))``=``A_p (1+sT_i)/(sT_i)`
`A_p` az arányos tag erősítése, `T_i` az integráló tag időállandója, `T_d` és `T_c` a differenciáló tag paraméterei, és feltételezem, hogy `N=T_d/T_c`.
A felnyitott kör átviteli függvénye a szabályzó és a szabályozandó rendszer átviteli függvényeinek szorzata:
`W_o(s)=W_\text{szab}(s)*P(s)`
Az a cél, hogy a szabályzó zérusaival kiejtsük a rendszer leglassabb időállandójú pólusait, így gyorsítva a szabályozott rendszer dinamikáját. Egész pontosan a PI szabályzóval a leglassabb pólust szokás kiejteni, a PD szabályzóval pedig a második leglassabbat:
`T_i=T_1`
`T_d+T_c=(N+1)T_c=T_2`
Ebből megvannak az időállandók, már csak `A_p` a kérdés. Ezzel fogjuk beállítani a kívánt fázistartalékot. Ezt úgy érdemes csinálni, hogy először beállítjuk az `A_p=1` értéket, majd leolvassuk a Bode-diagramról, hogy ekkor mennyi az erősítés azon a körfrekvencián, ahol a fáziskarakterisztika értéke -130°. Ennek az erősítésnek a reciproka lesz `A_p` kívánt értéke, így lesz a fázistartalék 50°.
Itt egy rövid MATLAB kód, ami elvégzi a szabályzótervezést a második rendszerhez: https://pastebin.com/huP2WUvf
Remélhetőleg az első rendszer analízisét ez alapján magad is el tudod végezni (pzmap, margin, feedback, step függvények).
0
- Még nem érkezett komment!